
OUR TEAMS 2024/25

Find out more
- Airframe Design: Build and refine the body of the UAV for optimal aerodynamics and durability.
- Advanced Imaging: Integrate high-performance camera systems for real-time data collection and observation.
- Propulsion Systems: Install and test propulsion systems to maximize flight efficiency and control.
- Power Systems: Choose reliable power solutions to extend flight time and performance.
- Flight Control: Develop and configure the control systems that guide the UAV through complex flight maneuvers.
- Communication Systems: Integrate communication technologies to enable reliable data transmission between the UAV and ground control.
Track Composition:
Engineering and Design: 40%
Prototyping: 60%
Find out more
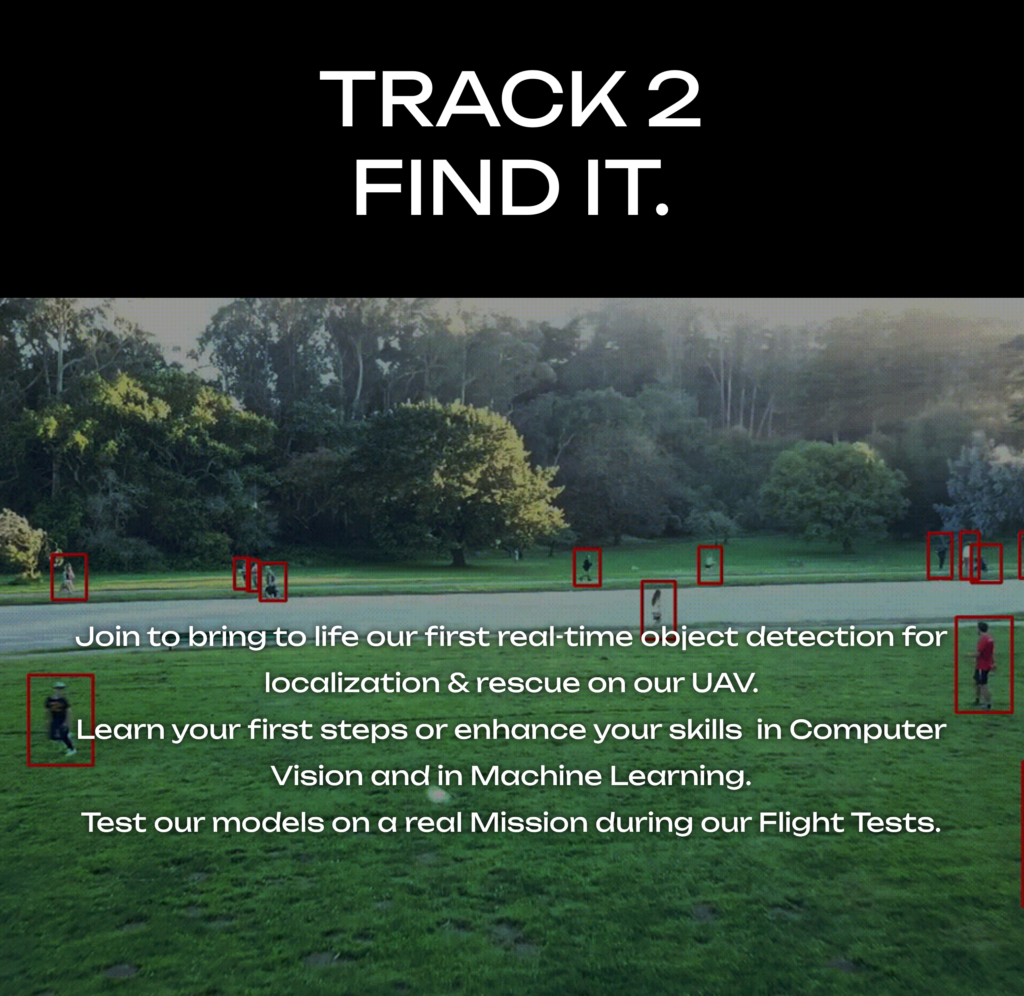
- Work with the object detection model YOLO on NVIDIA Jetson Orin for real-time, on-board person detection.
- Gain hands-on experience in fine-tuning pre-existing machine learning models for enhanced accuracy in person detection.
- Be part of launching a fully operational in-flight detection system on our custom quadrotor platform.
- Develop scripts that not only detect people but also report precise location data and relevant site characteristics.
- Test and refine the system in diverse environmental conditions—sun, overcast, dusk—using a variety of camera systems.
- Participate in live data acquisition during flight missions, helping to continuously improve the platform.
Track Composition:
Programming & Developing: 50%
Flight Testing: 50%
Find out more
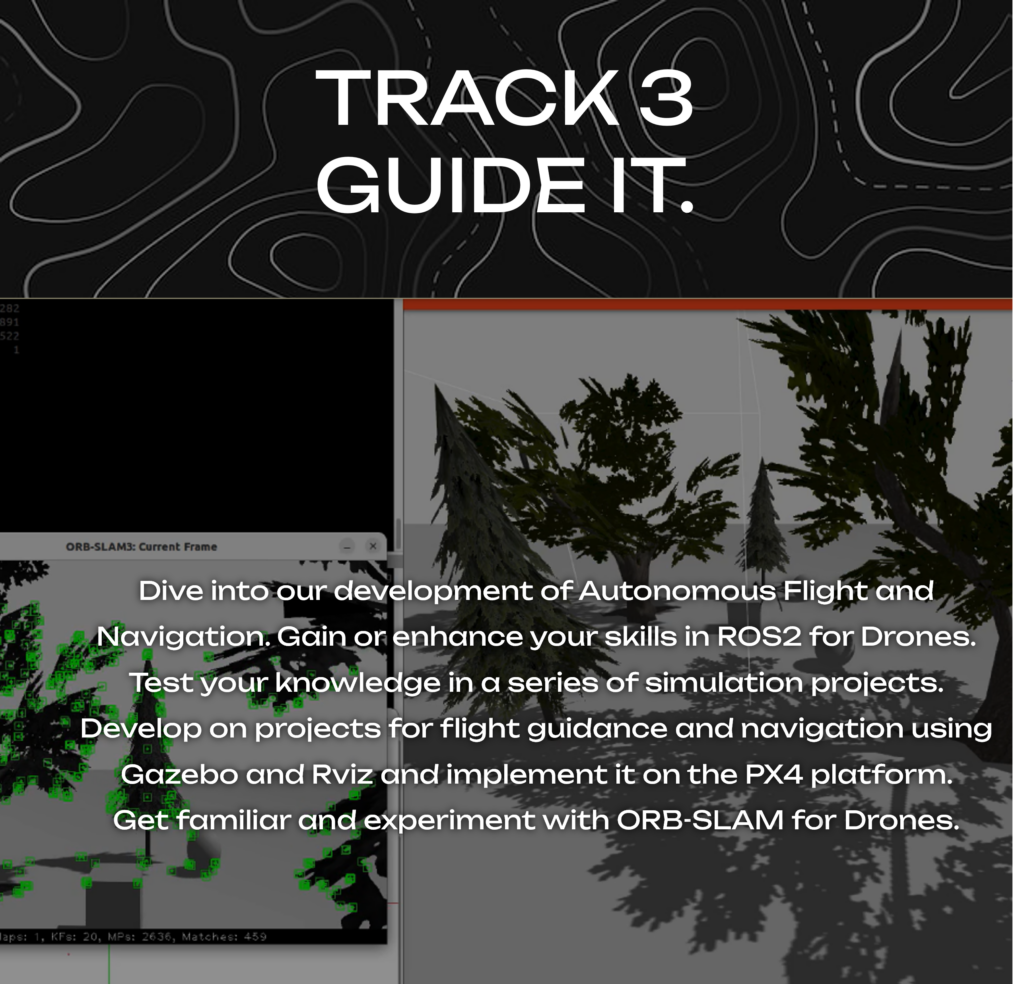
- Join our newly formed track on Autonomous Flight and Navigation.
- Learn or enhance your skills in Linux, ROS2, Gazebo and RViz. for Autonomous Flight and Navigation on Drones.
- Learn to understand intermediate concepts of navigation for drones in a simulated environment.
- Test your trained skills in a series of three projects during the semester:
– Developing simple projects for robotics with navigation using Gazebo.
– Developing simple projects for UAV with navigation using Gazebo and PX4
– Develop an intermediate project for UAV with Computer Vision and SLAM.
Track Composition:
Programming & Developing: 70%
Software Testing & Simulation: 30%

Find out more
- Join our newly formed Public Relations team as a copywriter, social media manager and event organizer.
- Become the face of Falcon Vision representing us at various events and collaborations across the industry and academia.
- Help us on our Sponsoring efforts by creating and maintaining relations with industry partners.

